There have been slight right deviations in the rocky forward movement.
it is pulling to the slightly to the right and wont go stright
any insight on that ? is it a bug ?
rami
There have been slight right deviations in the rocky forward movement.
it is pulling to the slightly to the right and wont go stright
any insight on that ? is it a bug ?
rami
Hi rami.shaked,
Due to the two motors in the rocky have tolerance scope, it is unavoidable that the speed of the two motors be slightly different.
While if the offset is very large, it is not acceptable. Please take a video to show the movement of the robot when it keeps moving forward, we will check if the offset is within normal range. You can send the video to daisy@makeblock.com via pCloud transfer website.
hello,
see the link of the movie
I’m an educator and looking forward to use it in my classes.
i see it as a product bug/defect , there is a lot of educational purpose using straight moving without deviation.
i’ll glad to know if you have any good solution for that.
Rami
Hi rami.shaked,
We have shared the video to our engineers, it is in the tolerance scope.
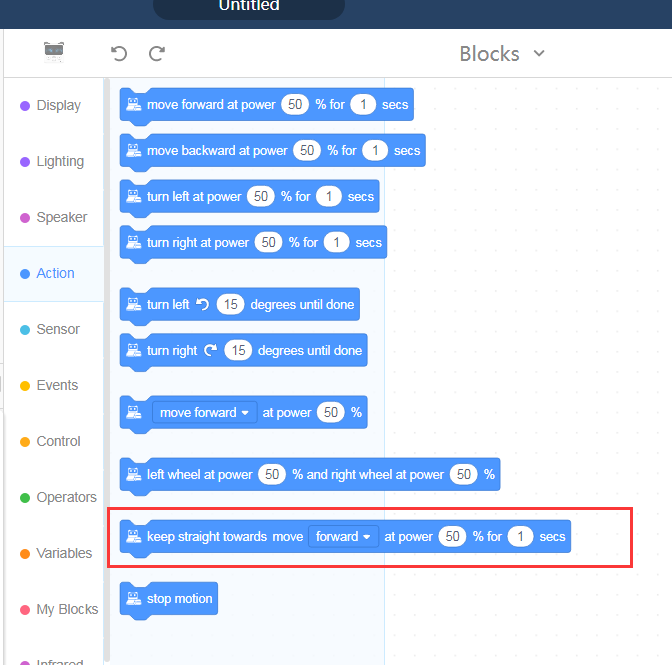
In mBlock program, we have a straight motion correction block (its principle is base on the gyro inside the Codey Rocky)
To use this program block, you need upgrade the latest firmware and then do the gyro sensor calibration first through mBlock software:
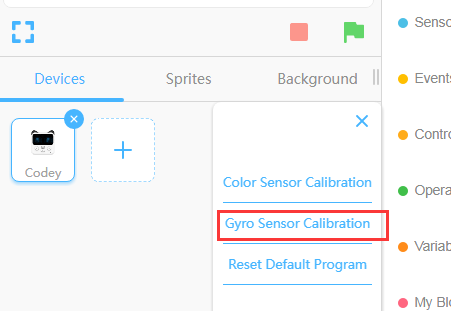
Due to that the data of the gyro changed a lot when the robot shake, it is suggested to hold the Codey Rocky in stock-still for a while (to let the value of gyro become stable) before you put it on the floor to walk forward.
hello,
After having gyro sensor calibration i tried with the straight motion correction block - no change ! it’s same as the “move forward”


Hi rami,
Have you already uploaded the latest firmware for codeyrocky with latest mBlock 5 software?
If yes, could you show the program (with block “keep straight towards move…”) you upload to the codeyrocky,and take a video to show your operation and the behaves on the robot with the uploaded program?