Hallo,
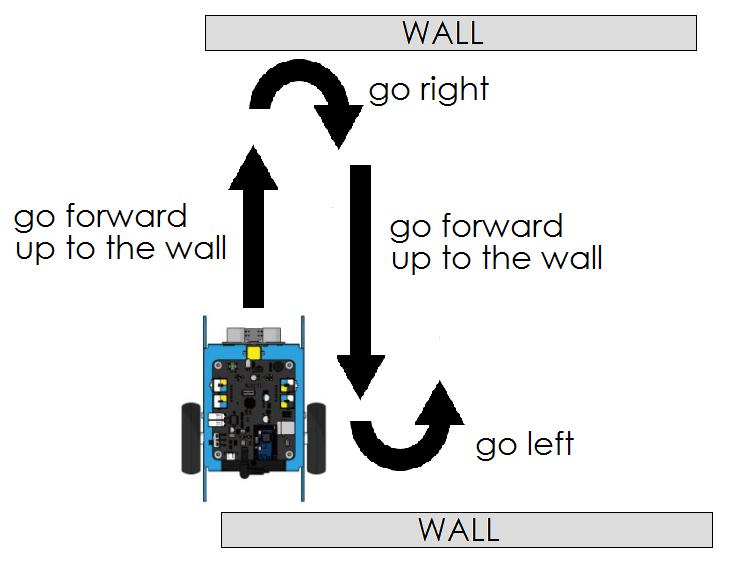
We want to program the mBot so that it runs up a firts the wall, turns to the right, drives up to the second wall and turns to the left. This pattern (please, see picture with the link) must be repeated 5 times. The distance to the wall is measured with the ultrasonic sensor. We encounter a problem with the combination of the function repeat forever (ultrasonic sensor) and repeat 5 times the parttern.
Is there anyone who can help us with the solution? Thanks.
J. De Winter