Hi,
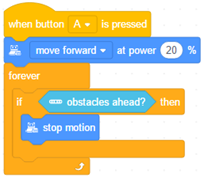
I’m trying to write a little program where Codey Rocky rids until it encounters a Duplo block (which we had lying around). It stops with the “obstacle detected” function.
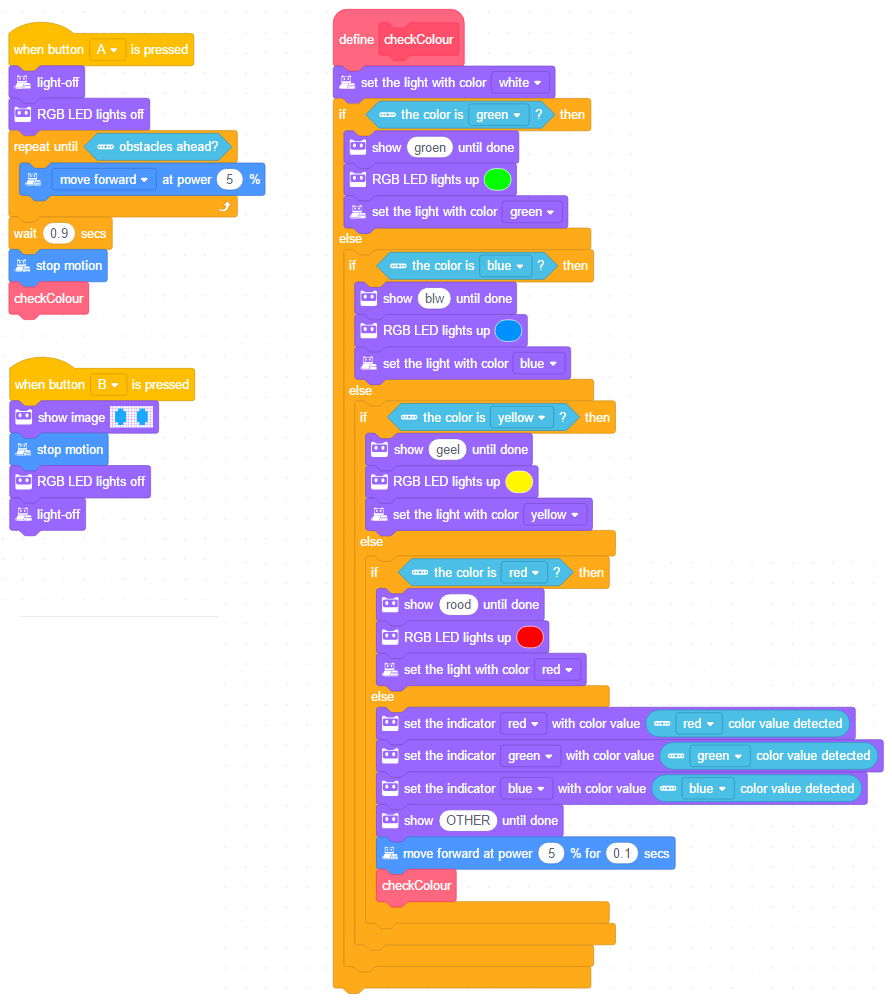
So unfortunately I keep getting different RGB values for the same colour block.
e.g. green block:
16, 71, 16
16,112,30
6,64,15
0,4,0
4,23,3
Strangely, when I enter the RGB values to control the Codey LED, I do get a (more or less) correct colour.
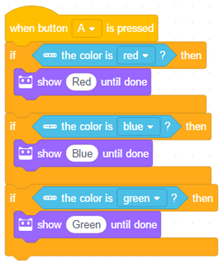
Is there a way to determine if a block is red, green, yellow or blue? (I’m not even considering pink, brown, black, grey, …)