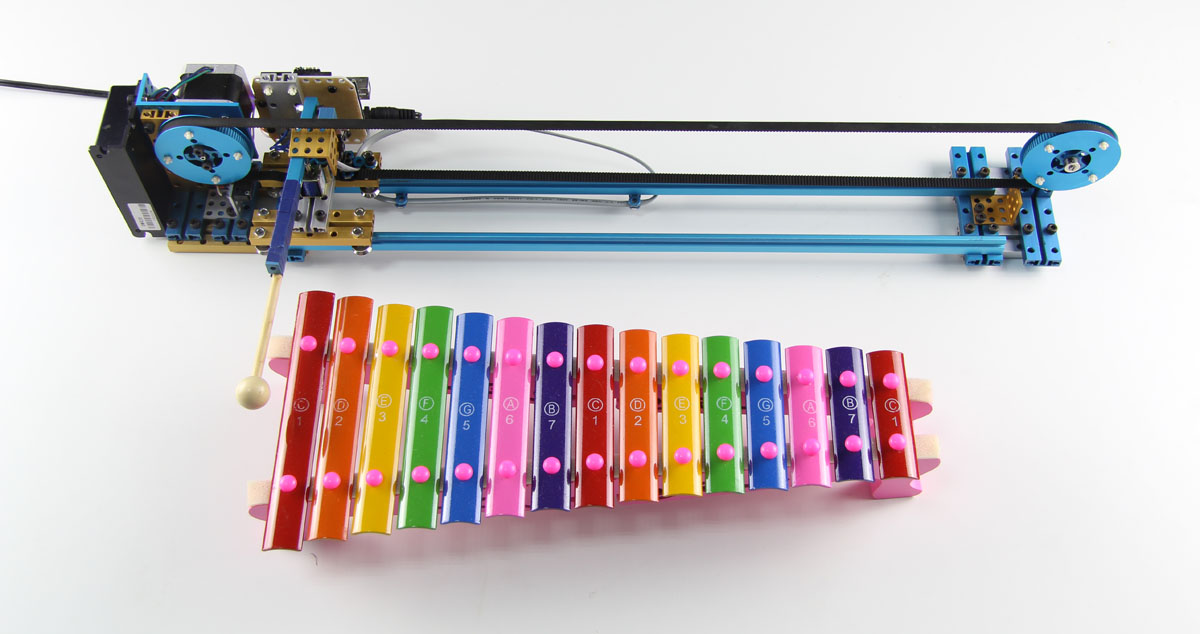
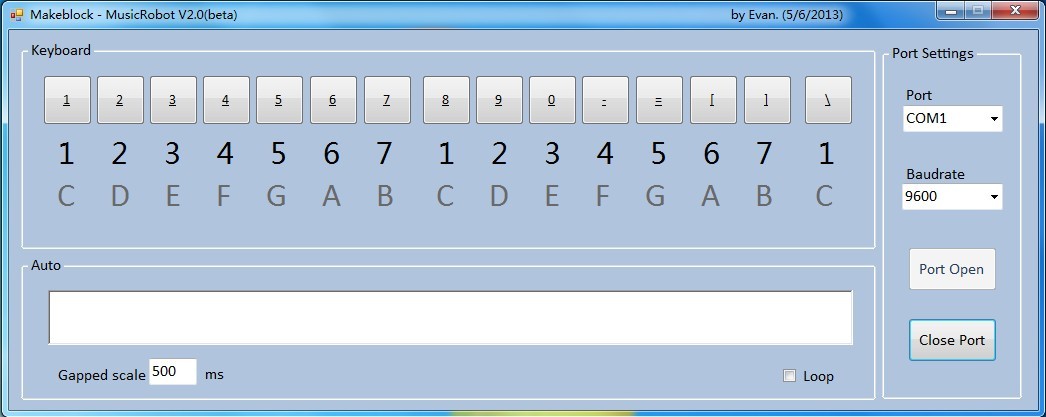
This is music robot controlled by application via USB cable installed on computer, and it can be controlled by the SmartPhone through the bluetooth.
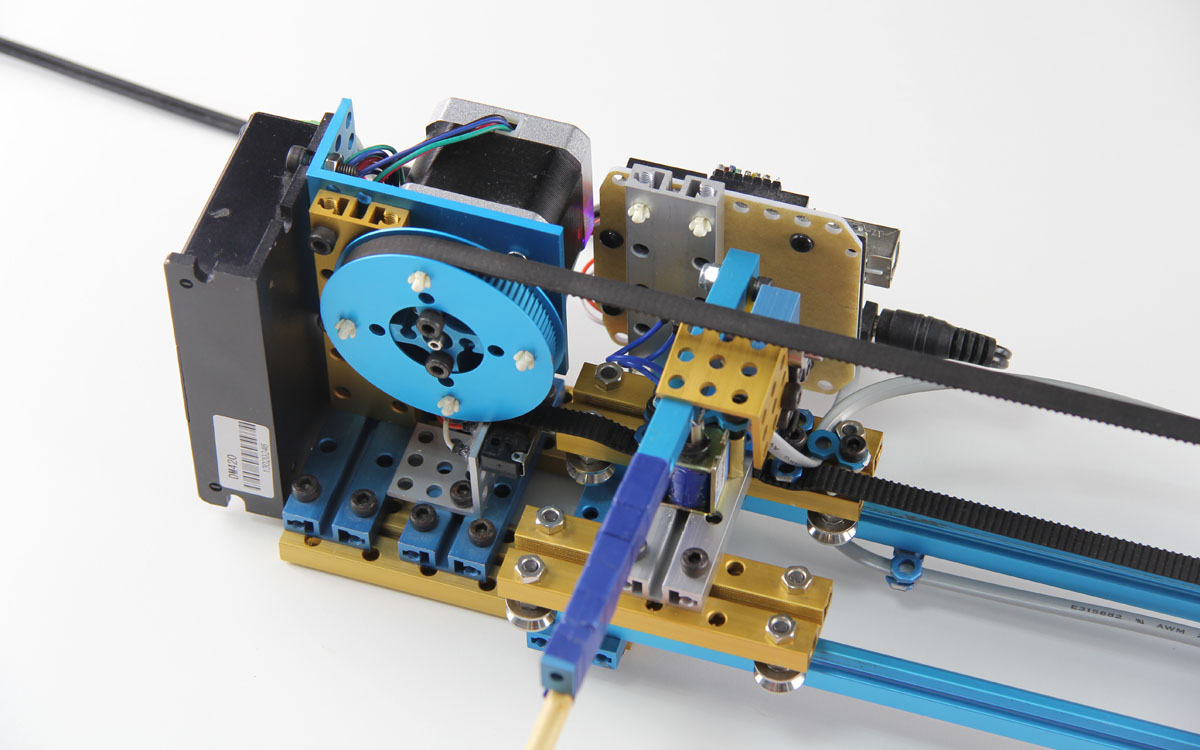
The music robot was built with the timing belt, sliding rail, step motor, electromagnet, motor driver and an Arduino Uno. And even you can build a play the piano robot with Makeblock by yourself.
The special application for Android Phone is in planning.
