Hi,
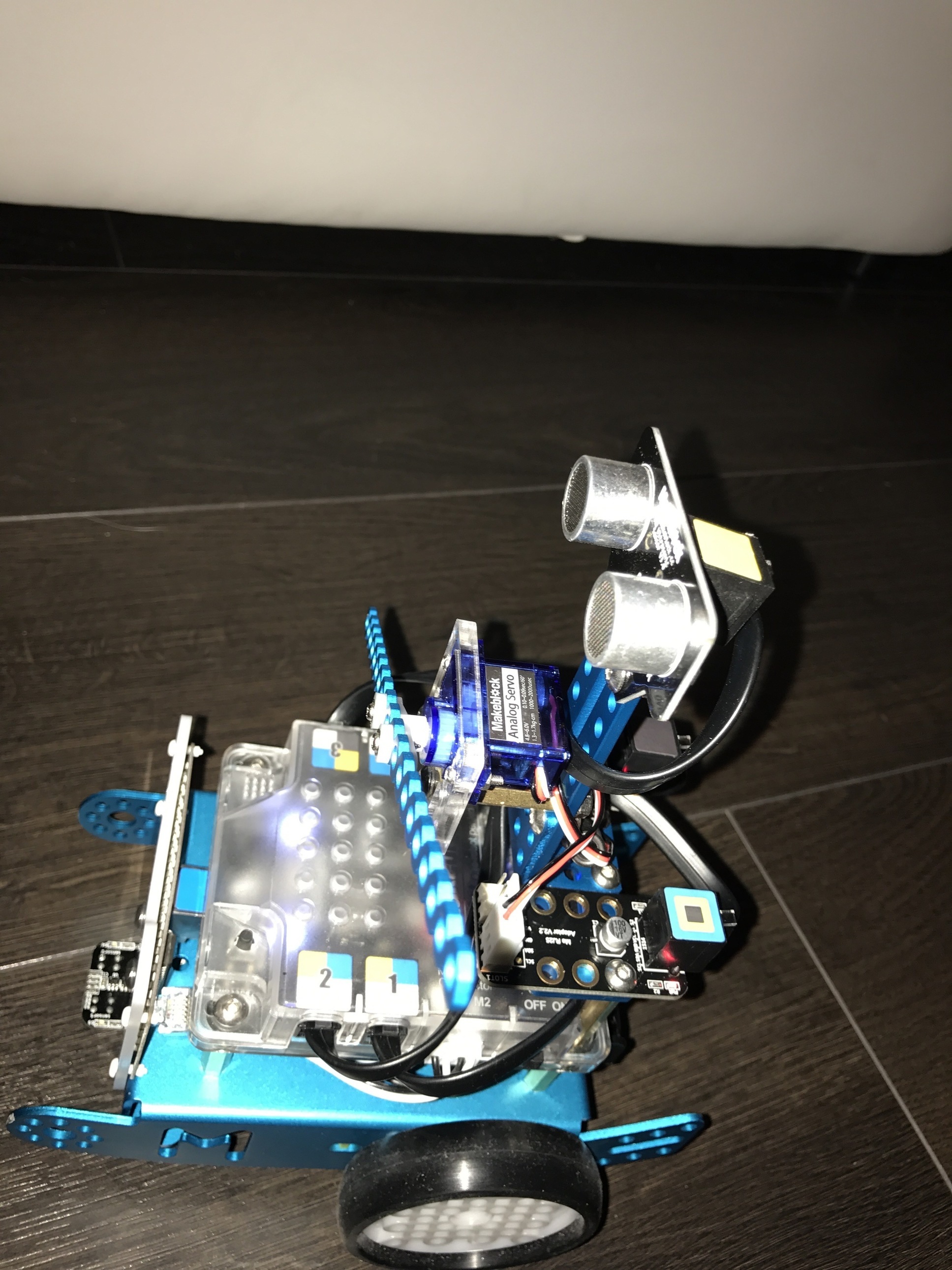
I recently bought for my daughter’s mbot the extension Add-on Pack - Servo Pack . We built the “Dancing Cat”. Additionally, we installed the LED matrix and the sound sensor. Everything went fine, all the sensors tested were working properly. However the servo pack itself its not behaving as I expected. I have a two main issues:
-
When I turn on the mbot, the servo pack is always rotating about 30 degrees, until it reaches 180 degrees plus about 30 degrees. E.g., If the original angle is 50 degrees when the mbot is off, when I turn it on it moves automatically to about 80 degrees. If i turn it off and then on again, it moves until about 110 degrees, and so forth until it reaches about 210 degrees, then I can turn off and on and is not moving anymore.
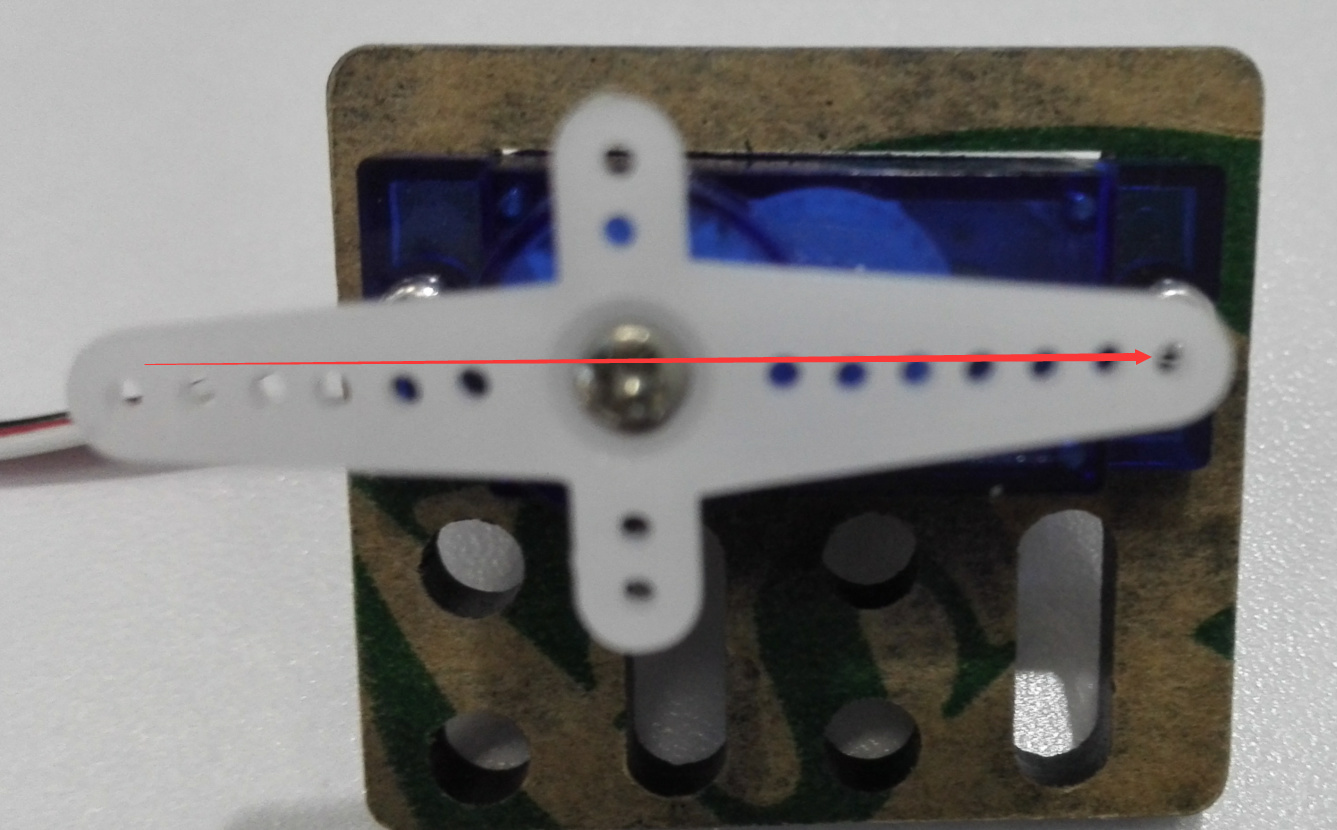
Why is this behaviour? I supposed when I turn on the mbot the rotor should no move, and if its moving it should try to reach either the 0 or 180 angle as starting point. This behaviour is annoying because I cannot make the correct angle to leave the horizontal bar having enough angle from both sides to move equally (to make movement like weaving). -
When I start to play with the angles, after setting different values, suddenly the mbot starts to move randomly (run forward or backward or in circles) or stop responding.
I tried attaching the horizontal bar in different angles but the behaviour is always the same.
I am thinking either something is connected incorrectly or the servo pack itself is damaged.
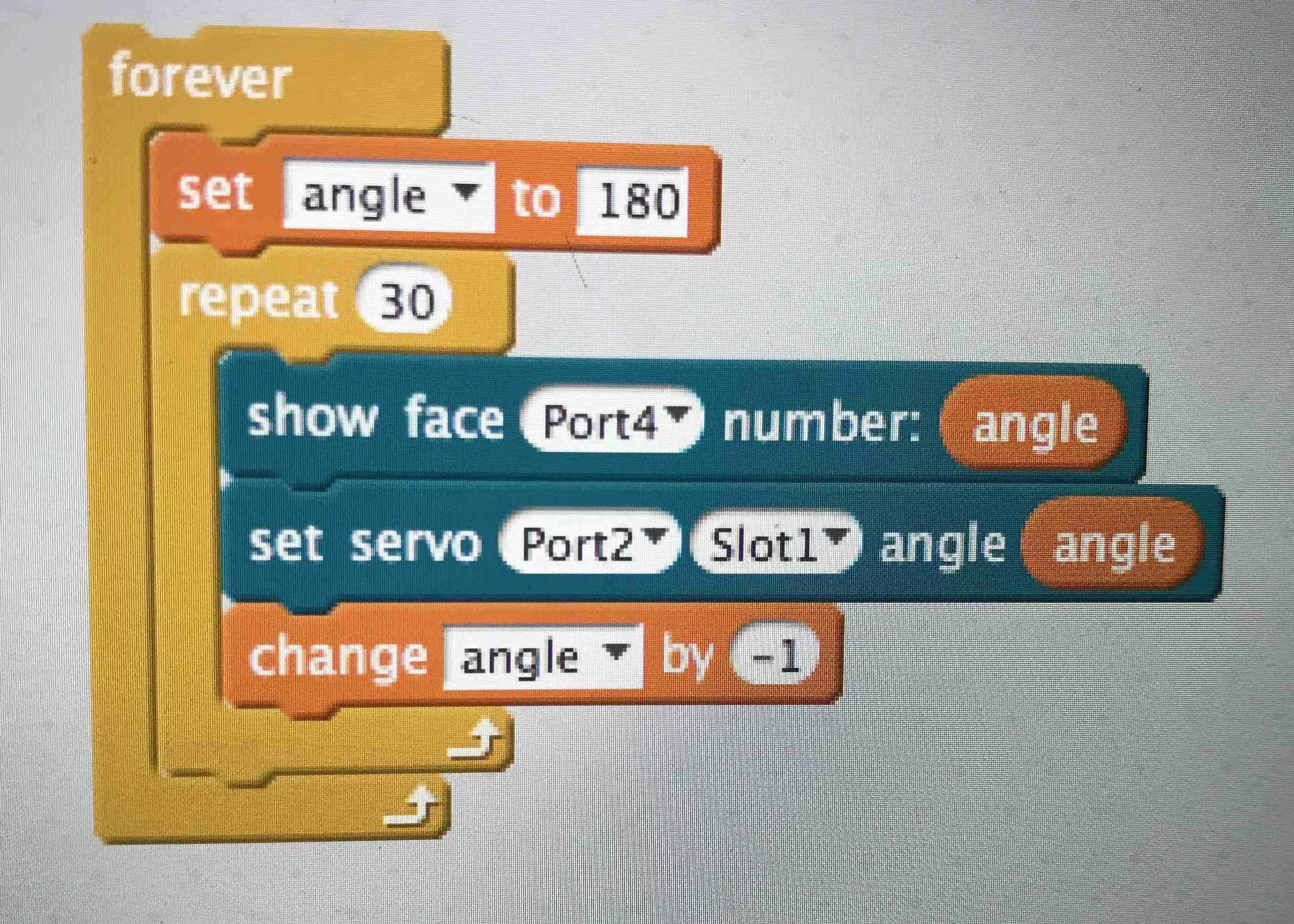
Can someone please help? To make it easier, I attach the picture of the current construction of the mbot. And then I also attach a video of what the mbot does with a very simple program that sets the rotor in 180 degrees and decreases 1 by 1 until 150, shows the value in the matrix, and repeat (forever)
The mbot:
The program:
The video executing the program:
https://box.psnc.pl/f/b357b9a99f/
Thanks,
Raul