Hi there, can anyone help me out with mBlock program.
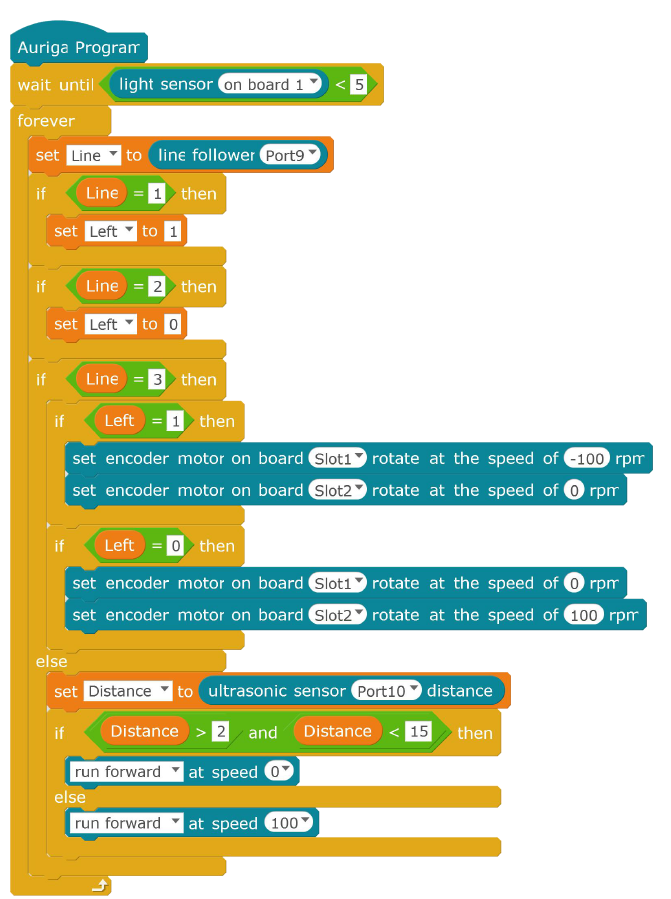
I am using the same program from Decision narrow line Chapter 14 for line following and obstacle avoidance for my mBot Ranger.
How ever, the program looks like the ranger stops once it detect the obstacle and turn around and goes back. (Please see the attachment for mBlock program)
Can anyone help me to do the same procedure as in the http://openlab.makeblock.com/topic/56e38e5660a70d5c503f7fce
where, mBot should be replaced by mBot Ranger.
Please help me to fix the obstacle avoiding algorithm moving forward for the program attached.