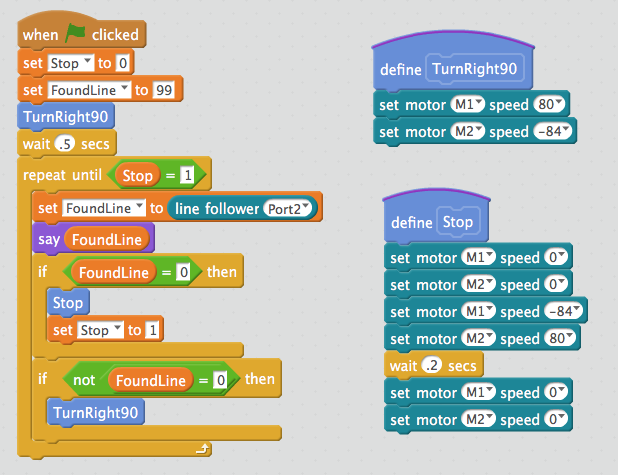
I’m working on a program that requires the mBot to make consistent turns in place. I’ve been fiddling around and it seems that to make this happen, I need to set one motor to a power setting that has a difference of at least 4 (plus or minus) because using the same power setting for both results in one motor not moving and the other making the mBot turn using the non-moving wheel as the center point of the turn. The code consists of a start block followed by two motor blocks (one for each motor) set to run the motors in opposite directions, a wait block set to 1 second, and then two additional motor blocks to stop the motors. The move block for turn left/right seems to follow the “steering” pattern of making the turn using the non-moving wheel as the center of the turn, so no luck there. I realize that the motors do not have encoders and therefore accurate turning may be difficult to achieve, but I’m open to trying other approaches.
Has anyone else experienced this issue and if so, what was your solution?