Hi 
Is it possible that two mBots can communicate with each other ?
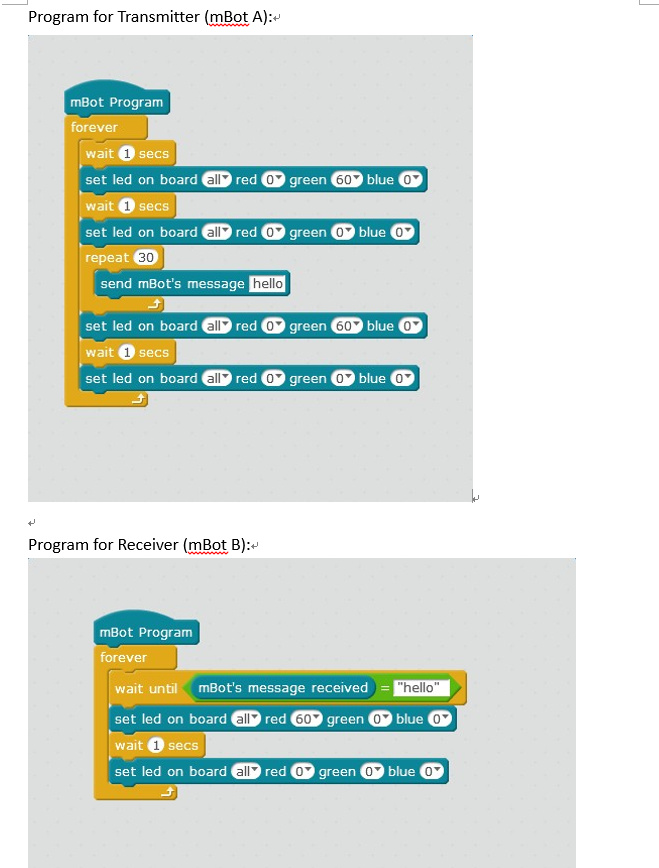
@Elisabeth_Birnbacher, of course, attached is a program for your reference, you can firstly upload to two different mBot and try Two mBot communication.sb2 (74.6 KB) For more questions, please contact us by tec-support@makeblock.cc
Hi Galactic_dragon,
No wireless module is needed, they communicate via the Infrared signal.
Hi Galactic_dragon,
We haven’t tested the other board. There is no robot message received program block for Orion board. There should be possible to to try with other ways which may be more complicated.
I would like to be able to send simple msg between megapi robot and orion robot. Example megapi is tow truck and orion has breakdown and sends simple msg “help”.
Is this possible and what modules/sensors would each robot require?
Hi rojoamigo,
Both the Orion board and Megapi have no no robot message received program block, so I am afraid that you can’t achieve it with the mBlock.
Normally, to achieve the communication between robots, you may use the IR signal, but we don’t have a IR transmitter module available. You may be able to achieve it use some other modules. Since we haven’t search much on such project, I am afraid that we can’t provide further suggestion.
If you use C++ interface you may have more possibilities…
I use MeAuriga with Arduino Uno (Orion base board) and Arduino Mega (Auriga base board).
I could add a 3rd party sensor to my Auriga. Using C++ is more complicated.
The one on the left controls the one on the right.
Pay attention to the time lag. The one on the right changes colors as soon as it gets the message.