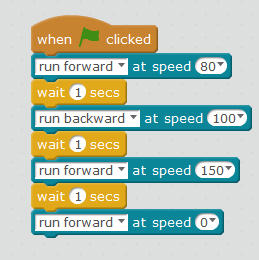
Hello I have a makeblock megapi robot. If I program this via the PC app or Android application often comes before the robot stops responding. Or he just keep going even though I brake.
There is a buzzing sound of the drums to be heard. I have to turn it off and then back on. Test programming is not possible because the error occurs continuously.
Today I connected the megapi to my Raspberry pi and have exactly the same problems.
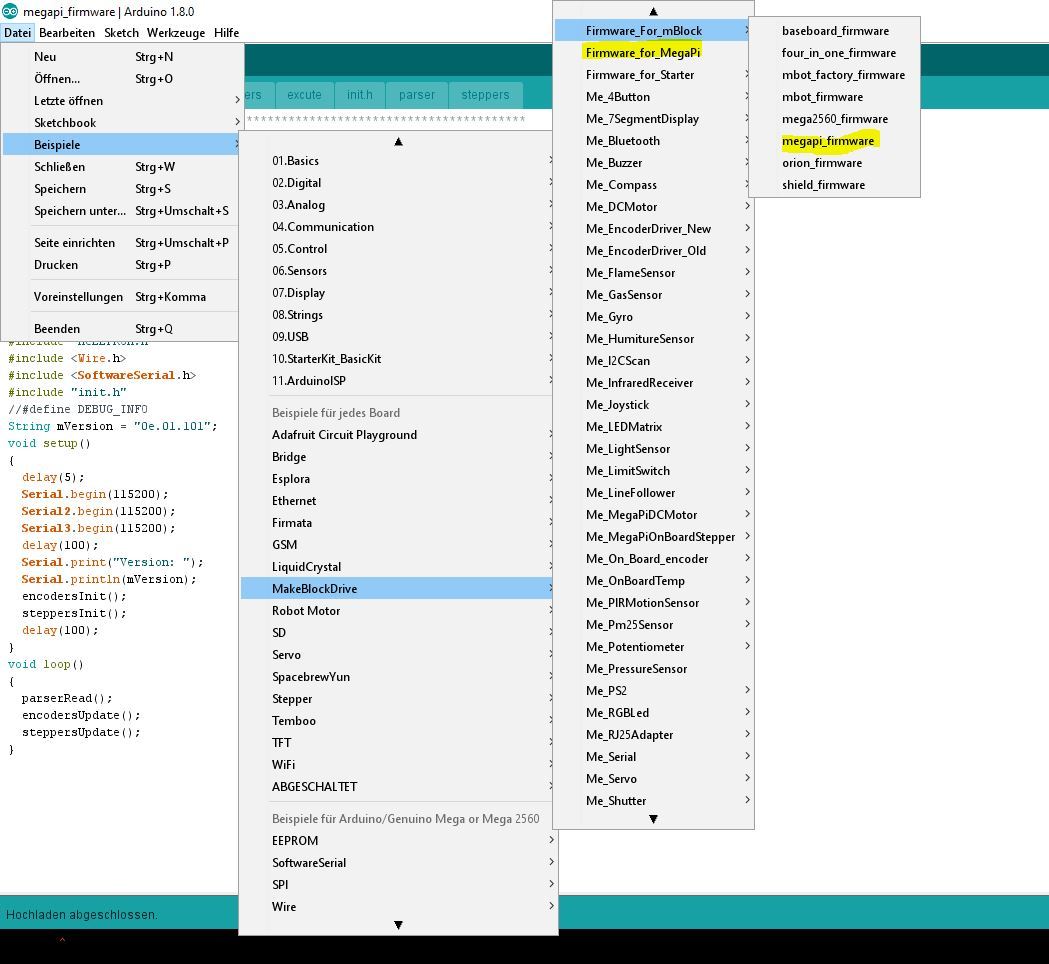
The Megapi is on the current firmware stand. What could that be?
Does anyone have similar problems?
Can it be at the firmware?
There are two different