Troubleshooting:
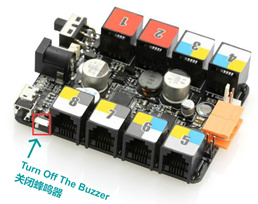
1. Make sure the Buzzer is off on the Me Orion board.
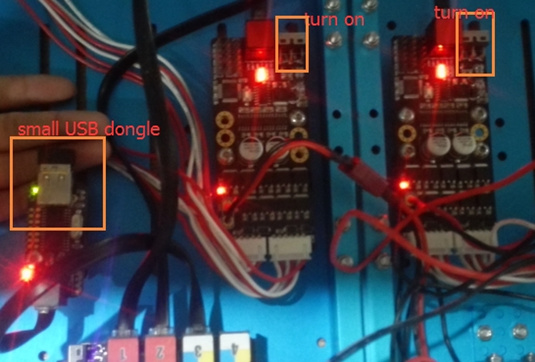
2. Check the light status on the USB Host and the game handle to judge if the game handle has been paired to the USB Host successfully. See detailed procedures below:
a. Turn on the power switch on each high power encoder motor driver, then turn on the power switch on the Me Orion board (The order of turning power switches cannot be reversed).
b. Turn on the power switch on the game handle, press the Start button. Normally a green LED lit up on the handle now. (The green and red LEDs will both lit up if press the Mode, this step is not necessary)
c. Now, check if the green LED lit up on the Me USB Host.
—If it is not, press the Reset button on Orion board have a try; (If it is still off, the Me USB Host may be faulty, or the robot hasn’t been uploaded correct firmware properly—it is suggested to check and upload the correct firmware refer to Troubleshooting 3 )
—If the green led lit up, shows successfully paired. Check done!
3. Check if upload the correct firmware successfully
In order to make the Mecanum robot work with higher accuracy, it is recommended to refer to this post to change one driver’s I2C address and upgrade Mecanum latest firmware.
4. Check the motors and motor drivers (upload the program example-- EncoderMotorTestMoveTo )
(If all above three parts haven been checked without any issue, but Mecanum robot still doesn’t move, we need to check if the motors and motor drivers work.)
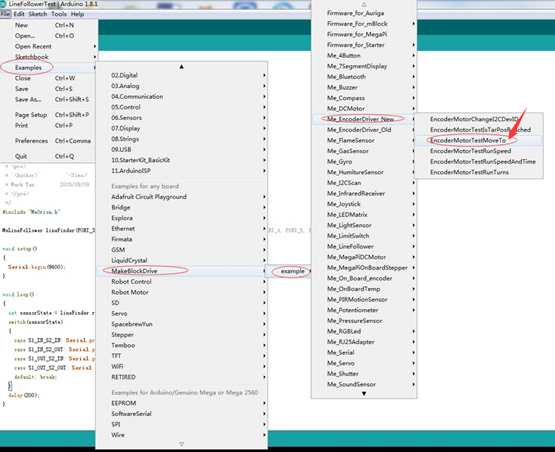
Upload the program EncoderMotorMoveTo, press the Reset button on Orion board. Then turn on the power switches on the Orion and two motor drivers.
----If four motors rotate properly, shows that the motors, drivers and Orion board are all working okay. Test done!
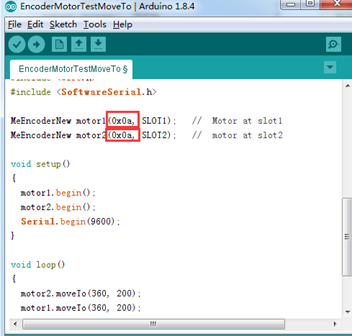
----If only two motors which connected to the same driver work, but the other two not work, the I2C address of the other driver may be changed (for example: from 0x09 to 0x0a);
In this case, we can change the 0x09 to 0x0a in the program EncoderMotorMoveTo, upload the program to test the second driver and the two motors connected to it.
----If none of the four motors rotates while testing above program (no matter with 0x09 or 0x0a). We can test the motors separately without drivers to figure out the issue is on motors or on drivers. (Normally, it seldom happens that both drivers get faulty, now, it is suggested to contact technical support to do further verification).